前言
随着美国的战略重点由反恐向大国竞争转变,美军积极推进第三次抵消战略,倡导应用无人系统、人机协同、人工智能等颠覆性技术,应对势均力敌大国的反介入/区域拒止( Anti-Access /Area-Denial,A2 /AD)战场的威胁。由美国防高级研究计划局(DARPA)于2015年启动的“小精灵”项目(Gremlin)就是美军智能化无人系统的典型代表,影响着美军未来作战方式的转变。
一、“小精灵”项目基本情况
“小精灵”项目是DARPA的战术技术办公室(TTO)负责的空射无人机开发工程。2014年9月,战术技术办公室发布“分布式机载能力”项目(Distributed Airborne Capabilities)的信息征询书(RFI),开始探索从C-130等母机发射、回收小型无人机的可行性。在“分布式机载能力”项目的基础上,战术技术办公室于2015年正式提出“小精灵”项目,旨在开发搭载各类载荷的小型空射无人机,以及多架无人机的空中发射与回收技术,并进行演示和验证,形成小型低成本无人机在反介入/区域拒止环境中遂行各类作战任务的创新方案,以及构建新型空中作战体系的可行性。
“小精灵”项目以低成本分布式作战为基本开发理念。随着势均力敌大国远程探测与攻击能力增强,传统的多功能载人飞机因成本高昂越来越不适应新的作战需求,而经得起消耗/可重复使用(attritable/reusable, A/R)的无人机将大大提升美军空中作战的灵活性和有效性。DARPA的“小精灵”项目就是A/R无人机研发的典型代表。一方面,利用母机远程运送、发射“小精灵”无人蜂群,可以在不依赖前沿基地的条件下深入反介入/区域拒止环境;同时,由于参与作战的无人机数量众多,损失少数无人机将不会对整体作战效果产生致命影响。另一方面,“小精灵”无人机设计建造费用低,可反复多次使用,但仅有20次的使用寿命,与隐形多功能战机、巡航导弹以及传统无人机相比,设计、建造与维护成本大大降低。DARPA专家丹·帕特(Dan Patt)对“小精灵”项目的描述最能体现其开发理念,即“以鲁棒性、响应性和可负担性的方式,使用情报、监视与侦察,以及其他模块化非动能载荷,进行令人信服的概念验证飞行演示”。
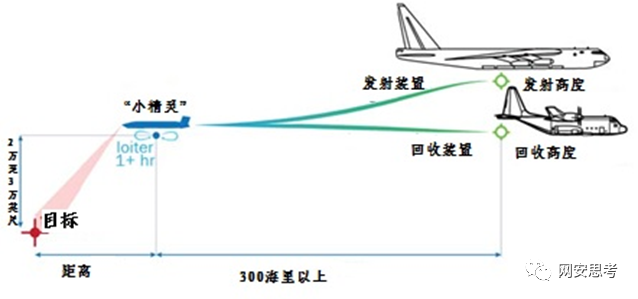 图1 “小精灵”无人机发射与回收示意图
图1 “小精灵”无人机发射与回收示意图
“小精灵”项目按照分阶段研发的方式逐步推进。按照DARPA的最初计划,“小精灵”项目分为三个研发阶段,每个阶段都是逐步完善所需要的设计与技术,以验证是否有能力达成项目开发目标。第一阶段的研发任务是开展系统的概念化研究,重点包括“小精灵”目标系统和演示系统的设计,以及技术成熟计划(Technology Maturation Plan)的制定;该阶段的研究工作于2016年启动,由Composite Engineering、Dynetics、通用原子-航空系统和洛克希德·马丁四家公司负责。第二阶段的研发任务是执行技术成熟计划,重点包括对主要子系统、模型等进行分析,以及实验室和现场演示;该阶段研究工作于2017年启动,由Dynetics、通用原子-航空系统两家公司负责。第三阶段的研发任务是进行演示系统的设计、制造和集成,并依托C-130运输机进行空中发射与回收实验;该阶段研究工作于2018年启动,由Dynetics为主承包商的研究团队负责,并提供5架“小精灵”无人机(其中1架于2019年11月坠毁)用于演示验证;由于疫情影响,该阶段研发工作尚在进行中;2019年,美空军将“小精灵”无人机命名为X-61A。随着“小精灵”项目价值的日益凸显,美军于2020年决定增加第四阶段研发(2021-2023年),吸纳“拒止环境中的协同作战”项目(CODE)的成果,开展分布式空中作战的能力演示。
表1 “小精灵”无人机相关技术指标
设计指标 | 最低标准 | 目标标准 |
设计半径 | 300海里 | 500海里 |
设计半径下滞空时间 | 1小时 | 3小时 |
设计有效载荷 | 60磅 | 120磅 |
最高速度 | 0.7马赫 | 0.8马赫以上 |
最大发射高度 | 未指定 | 40000英尺以上 |
推进系统 | 目标系统可采用概念设计发动机模型,或现有推进系统或改进的推进系统进行设计。 | |
有效载荷功率 | 800瓦 | 1200瓦 |
有效载荷安装 | 未指定 | 侧面和前/下向孔径规定 |
有效载荷类型 | 搭载模块化载荷,包括射频、光电等不同任务载荷。 | |
设计寿命 | 未指定 | 重复使用20次 |
母机发射平台 | B-52、B-1、C-130 | 尽可能多类型的飞机,包括战斗机 |
发射数量 | 每架母机可发射8架以上 | 大型母机可发射20架以上 |
回收飞机 | C-130 | |
回收数量和时间表 | 30分钟回收4架以上无人机;目标是回收8架以上。 | |
成功恢复的概率 | 时间窗口内达到0.95以上 | |
恢复和翻新周期 | 从回收到重新安装到飞机上进行发射的时间不超过24小时。 | |
二、“小精灵”项目关键技术分析
“小精灵”项目概念新颖、装备协同度高、作战体系性强,对技术应用有着很高的要求。从DARPA和相关承包商公布的信息分析,“小精灵”项目的关键技术包括以下三个方面。
(一)利用模块化开放架构达成不同能力的兼容
美国《2017财年国防授权法案》明确规定,国防采办项目要在最大范围内采用模块化开放系统方法进行设计和开发,以支持互操作性和迭代发展。美国防部《无人系统一体化路线图2017-2042》也要求无人系统要贯彻通用开放架构、模块化等设计理念,增强互操作性。
根据项目承包商Dynetics发布的信息,“小精灵”无人机按照模块化开放系统架构的理念进行设计,可以直接集成各类载荷、通信系统和任务软件,形成不同能力的融合、叠加与集成,支持遂行多样化军事行动。这意味着“小精灵”无人机以执行单一任务为优先重点,并随着战场需求的变化以“即插即用”的方式灵活的融入新技术和新系统。以载荷为例,“小精灵”无人机的载荷设计标准最终要达到120磅,可根据任务需要搭载光电/红外成像系统、合成孔径雷达、激光指示器等情报、监视与侦察载荷,以及电磁战、导弹等软硬杀伤载荷。同时,“小精灵”无人机与美空军的后勤基础设施兼容适配,无需对保障装备进行重新设计和改装,实用性大大提高。
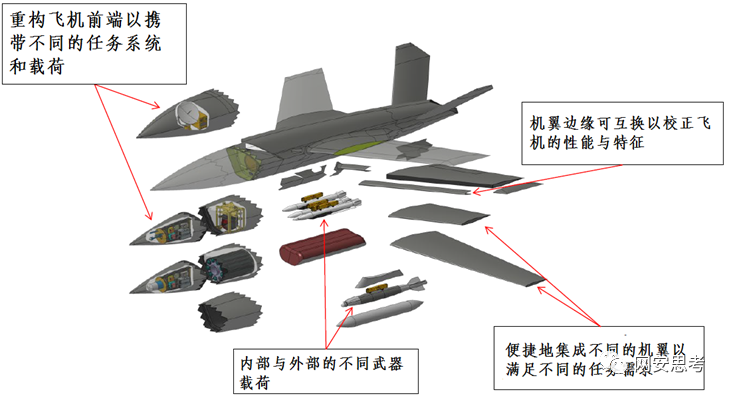 图2 无人机模块化开放架构示意图
图2 无人机模块化开放架构示意图
(二)借鉴自主空中加油技术解决无人机回收难题
“小精灵”项目“最具挑战性的技术风险是在不危及母机的情况下解决无人机的回收问题”[1]。Dynetics公司的设计与演示中,C-130运输机通过类似空中加油的拖拽方式回收“小精灵”无人机,速率为每30分钟回收4架(参见图3)。

图3 “小精灵”无人机回收示意图
“小精灵”无人机的回收技术借鉴了美军自主空中加油项目的相关成果,其中最重要的是DARPA与NASA联合实施的“自主空中加油演示”项目(Autonomous Airborne Refueling Demonstration, AARD)。例如,具有精准导航功能的“小精灵自主对接系统” (GADS),技术基础源自AARD系统(参见图4),且开发商同为SNC公司。AARD系统配有GPS/INS组合相对导航系统、数据记录器和数据链调制解调器用于从加油机接收数据,并计算形成加油机与受油机之间的精确位置;同时,AARD系统还嵌入了摄像追踪系统,持续采集到加油机锥套(drogue)的方位角、仰角和距离等数据,并利用算法进行计算,以支持精准对接[2]。图3与图4对比可以看出,AARD系统支持下的自主空中加油与“小精灵”无人机的回收模式十分相似,相关技术可以迅速实现转化应用。SNC公司也表示,GADS利用精准导航能力实现“小精灵”无人机的导航、引导与控制,这种能力最初是为AARD等项目而开发。
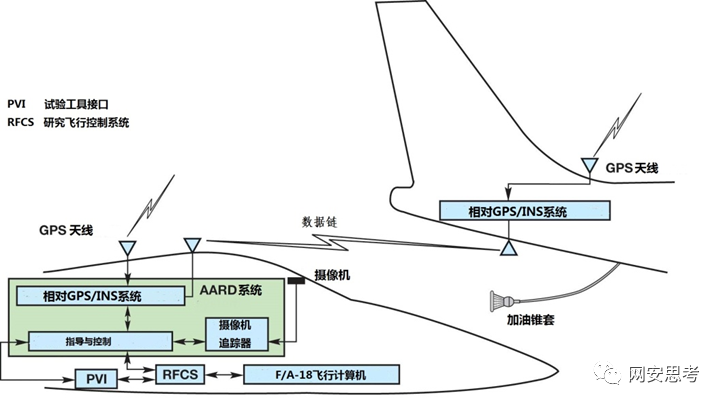
图4 AARD系统示意图
“小精灵”项目还利用商用现货技术提升导航能力,以支持无人机的精准回收。例如,Dynetics公司将澳大利亚现代导航公司(Advanced Navigation)的产品Spatial Dual配置于C-130运输机。Spatial Dual既是一款GPS辅助的惯性导航系统,又是一款航姿参考系统(AHRS),它融合了温度校准加速器、陀螺仪、磁强计、压力传感器,以及双天线RTK GNSS接收器,并通过复杂的融合算法进行耦合,可以提供精准的位置、速度、加速度和方向等定位信息,支撑“小精灵”无人机实现安全可靠的空中回收。
(三)结合协同自主技术赋能蜂群智能化行动
DARPA指出,美军大多数无人机都需要专门的驾驶员和传感器操控员进行持续控制,并由众多的分析师提供支持,限制了无人机作战的可扩展性和成本效益[3]。为此,DARPA才在“小精灵”项目第四阶段研发工作中,纳入“拒止环境中的协同作战”项目(CODE)[4]开发的协同自主技术。从关键技术分析,CODE项目将从三个方面支持“小精灵”项目。
一是单机自主。每架无人机皆具有自主能力,“小精灵”无人机蜂群才能实现分布式空中作战。在CODE项目的“单机自主技术”支持下,“小精灵”无人机自主能力可以包括:分析温度、压力等本机状态数据,识别、应对常见意外,解决数据链路故障,侦察数据的本地化分析,定义、控制复杂飞行轨迹,以及移动目标追踪。
二是蜂群协同自主。无人机蜂群要有效执行任务,必须在数据融合共享的前提下,共建认知、及时规划、动态编组。在CODE项目的“编队自主技术”支持下,“小精灵”无人机蜂群的协同自主能力可以包括:多源异构数据融合,共同的决策与建模框架,蜂群与子蜂群的动态编组,不依赖GPS、通信卫星等资产支持而独立遂行任务,适应战场高度的不确定性和动态变化。
三是蜂群的管理。CODE项目开发出人机界面(Human-System Interface),使人类指挥官摆脱繁杂的操控工作而升级为蜂群的管理者。在人机界面支持下,人类指挥官可以对“小精灵”无人机蜂群的管理可以包括:监督控制战术行动,推进任务规划,与无人机的交互,感知当前和未来状态,运用人的判断支持任务执行。
三、“小精灵”无人机蜂群的作战应用分析
“小精灵”无人机功能多样、使用灵活、协同自主性强,将在大国军事竞争中发挥重要作用。根据美相关智库对无人机蜂群作战应用的分析,以及“小精灵”无人机的技术特点,未来“小精灵”无人机蜂群的作战应用包括三个方面:
(一)深入A2 /AD环境遂行蜂群化的侦打作战
按照DARPA的设计,与F-22、F-35等传统的多功能战机相比,“小精灵”无人机蜂群能够以协同化、分布式作战行动渗透敌防御系统,深入A2/AD环境遂行任务(参见图5)。
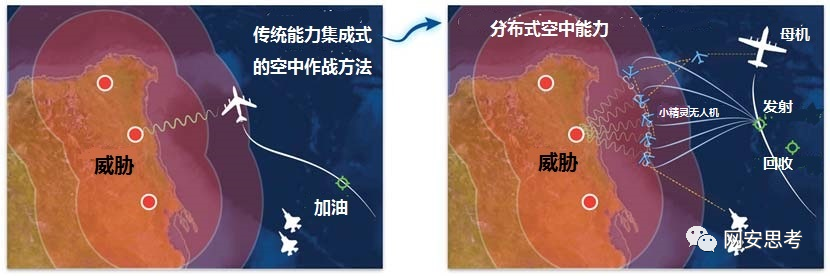 图5 “小精灵”项目作战示意图
图5 “小精灵”项目作战示意图
“小精灵”无人机蜂群可以执行两类作战行动:一是蜂群侦察监视。搭载信号情报、雷达、光电等不同侦察载荷的“小精灵”无人机蜂群由母机释放到作战空域,蜂群依托协同自主技术完成编队与组网后抵近目标实施实施全方位侦察;同时,针对战场态势、目标特征以及蜂群运行状态等情况,实时、动态的规划任务与行动路径。二是蜂群“侦打一体”作战。“小精灵”无人机蜂群根据任务需要分别搭载侦察监视、网电作战等不同载荷,由搭载侦察监视载荷的无人机获取目标数据并实时共享,由搭载网电作战载荷的无人机实施攻击行动。
(二)与载人战机编组实施协同攻击行动
“小精灵”无人机速度达到0.7马赫以上,“高航速使其具有与其它打击平台协同编组的潜力”[5]。特别是随着DARPA的“拒止环境中的协同作战”、“体系集成技术和试验”[6](SoSITE)等项目的成熟,“小精灵”无人机可以与美军的第五代战机编组,对目标实施协同攻击。以防空系统突防为例,“小精灵”无人机可以与载人战机实施两类编组行动:
一是“小精灵”无人机蜂群引导下的载人战机突防(参见图6)。一方面,搭载侦察载荷的“小精灵”无人机蜂群可抵近、渗透A2/AD环境进行探测,发现敌防空系统后将信息回传载人战机,由载人战机实施精准打击或机动规避。另一方面,“小精灵”无人机蜂群可以作为诱饵使敌防空系统打破“静默”状态,暴露侦察装备、防空导弹等重要目标的位置,为载人战机摧毁敌防空系统提供机遇。
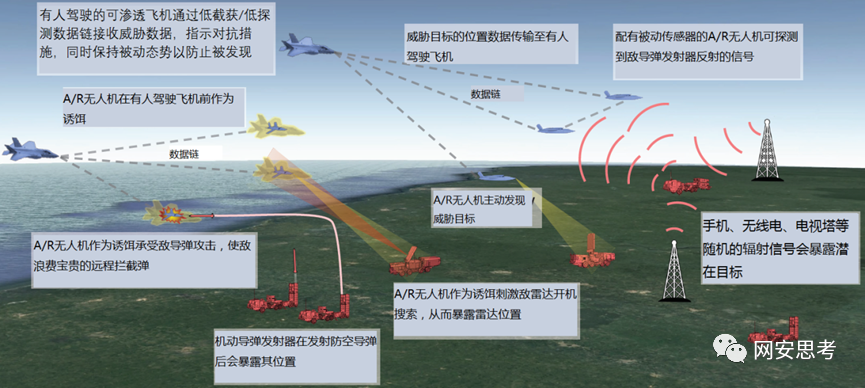
图6 “小精灵”无人机蜂群引导下的载人战机突防
二是“小精灵”无人机蜂群网电攻击下的载人战机突防(参见图7)。搭载网电攻击载荷的“小精灵”无人机蜂群,根据地理位置、辐射源特征等要素,对敌防空雷达、指控链路、电子系统等实施网电攻击,为载人战机的突防、渗透与目标打击创造“时间窗口”。
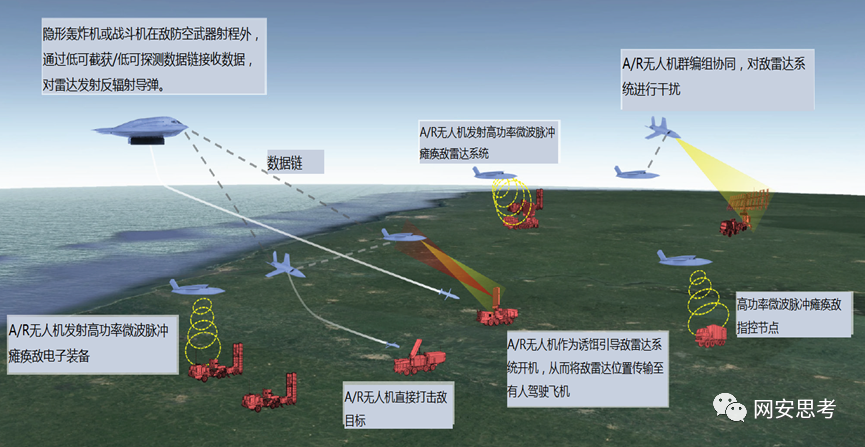
图7 “小精灵”无人机蜂群网电攻击下的载人战机突防
(三)作为重要节点串联马赛克战“杀伤网”
马赛克战(Mosaic Warfare)是DARPA 于2017年8月提出的新作战概念,其主张“整体分解”(monolith busting),将单一平台的功能分解至低成本、可消耗的平台,“使效果链的诸要素分布式于众多的传感器和平台上,而非将效果链集中于单一平台”[7],形成功能分散部署的分布式“马赛克瓷砖”(参见图8)。而“小精灵”无人机具有成本低、可重复使用、蜂群化投放等特点,是功能分解的理想承接工具,并将被DARPA用于未来马赛克战的实践。
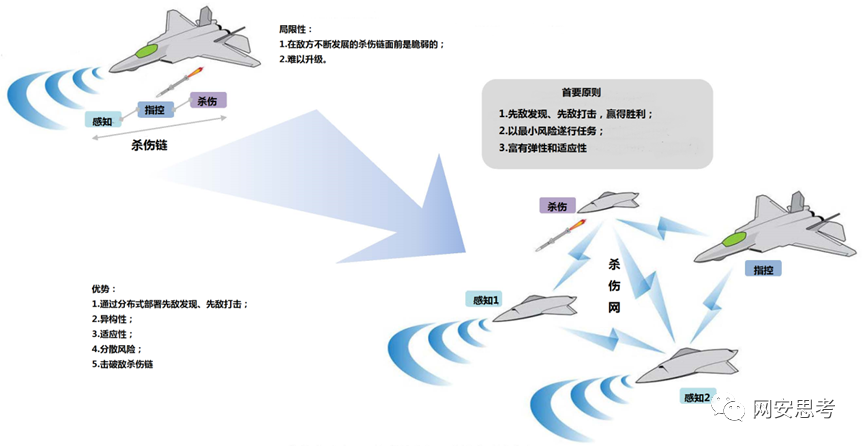
图8 “大而全”的单一平台向多平台的功能分解
按照马赛克战的理念预判,承载了不同作战功能的“小精灵”无人机蜂群,将依托人工智能技术和动态自适应网络,根据不同类型任务需要、战场上的实际动态,与其它有人与无人平台快速构建出链接链路、数据服务链路及功能协同链路,灵活拼接形成多种打击方案,完成跨域多源感知、异构信息融合、作战数据交链、全域联合打击等行动。这“杀伤网”式的作战方式不仅能够使整个战场体系更富生存性,而且能够增加敌方认知负担,形成非对称优势(参见图9)。这正如DARPA专家丹·帕特所言,“从数学上来计算,你可以达成所有可能的组合,创建成千上万的连接”,迫使敌方要应对所有可能的攻击组合[8]。
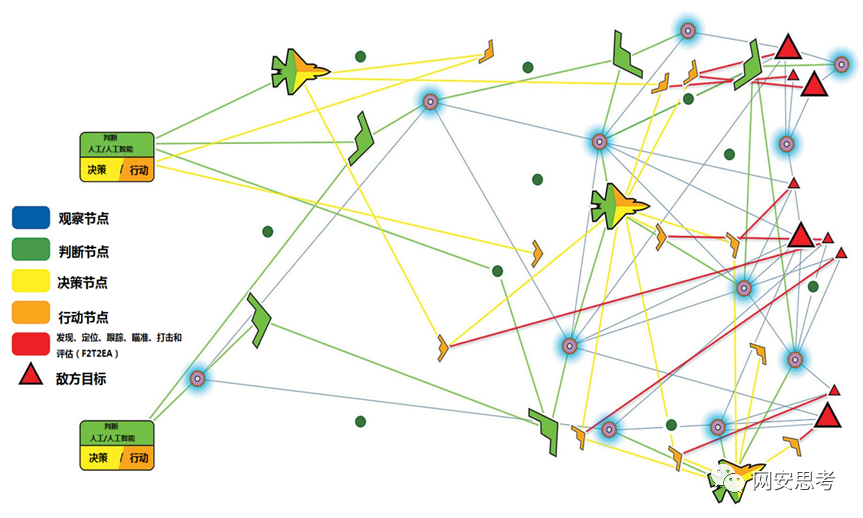
图9 马赛克战作战效果示意图
四、“结束语
“小精灵”项目是美军“载荷+平台”装备发展理念的集大成者,其以未来大国竞争的军事需求为牵引,以无人化、人工智能等前沿性、先导性技术为支撑,对美军形成分布式立体杀伤、有人—无人协同、蜂群自主行动等颠覆性作战能力具有重要的赋能作用。因此,应进一步加强对“小精灵”项目的跟踪研究,从其设计理念、技术特点、战法战术等方面挖掘可资借鉴的内容,支持国防和军队现代化建设。
参考文献:
[1]Paul Calhoun, "DARPA Emerging Technologies",Strategic Studies Quarterly, Fall 2016.
[2] Ryan P. Dibley, Michael J. Allen, Nassib Nabaa,"Autonomous Airborne Refueling Demonstration, Phase I Flight-Test Results", 2007年12月,https://ntrs.nasa.gov/api/citations/20080003275/downloads/20080003275.pdf.
[3] DARPA,"Collaborative Operations in Denied Environment (CODE)", https://www.darpa. mil/ program/
collaborative-operations-in-denied-environment.
[4] CODE项目(2014-2019)同样由DARPA的战术技术办公室负责,旨在开发先进算法和模块化软件架构,赋予无人机协同自主能力,使其根据既定交战规则打击目标,在少监督条件下与其它CODE赋能装备协同活动,并适应战场的动态变化。
[5]Paul Calhoun, "DARPA Emerging Technologies", StrategicStudies Quarterly, Fall 2016.
[6]SoSITE项目由DARPA于2014年启动,旨在开发算法、软件与电子技术以建设鲁棒性的开放式架构,支持侦察、打击等功能的解耦部署,有人与无人平台之间的快速组合以及分布式协同,以在作战环境中保持美国的空中优势。
[7] DARPA STO Talks "Architecture on Demand" – Mosaic WarfareConcept, https://www.naylornetwork.com/jed-
showDaily/articles/index.asp?aid=587520&issueID=76039.
[8]"DARPA Tiles Together a Vision of MosaicWarfare", https://www.darpa.mil/work-with-us/ darpa-tiles-together-a-vision-of-mosiac-warfare.
声明:本文来自网安思考,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。